Zum Profil

Seminar: Moderne, visuelle SLAM und Odometrie Systeme
Organisatorisches
Unverbindliche Interessensbekundung:
Formlose E-Mail mit Betreff „[Seminar-WS2526] Interesse <Name>“ an mmints@uni-koblenz.de bis zum 17. August 2025
Weitere Informationen:
Die Anmeldung erfolgt über Klips ( https://klips.uni-koblenz.de/v/165014)
- Maximale Teilnahmezahl: 12
Der erste Termin findet in der ersten Vorlesungswoche statt.
Inhalt
Beschreibung
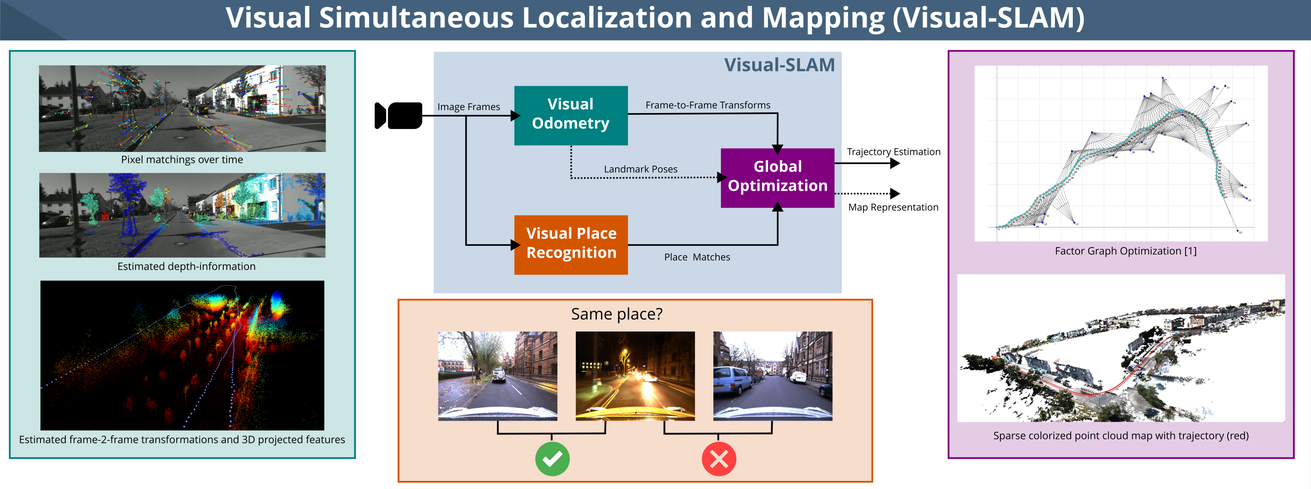
Visuelle Simultane Lokalisierung und Kartierung (VSLAM) und visuelle Odometrie (VO) sind Kernbestandteile autonomer Systeme sowie essenzielle Technologien für moderne Augmented- und Virtual-Reality-Hardware. Beide Verfahren nutzen Kamerabilder zur Schätzung der Bewegung einer Kamera in einer unbekannten Umgebung – VO bestimmt dabei nur die Eigenbewegung, während VSLAM zusätzlich eine Karte der Umgebung aufbaut.
Im Seminar beschäftigen wir uns mit aktuellen Methoden für VO und VSLAM, sowohl aus dem klassischen Bereich (geometrisch, optimierungsbasiert) als auch mit lernbasierten Ansätzen. Darüber hinaus untersuchen wir den Einfluss unterschiedlicher Kameramodalitäten – etwa Monokular-, Stereo- oder Event-Kameras – auf die Wahl und Performance der Verfahren.
Vorkenntnisse in Bildverarbeitung und/oder Robotik (z. B. durch vorherige Module oder praktische Erfahrungen) sind hilfreich, aber nicht zwingend erforderlich. Ziel ist es, die Konzepte hinter aktuellen Forschungsarbeiten zu verstehen und in einer eigenen Ausarbeitung kritisch zu analysieren.
© Universität Koblenz



