
Macropod
Description
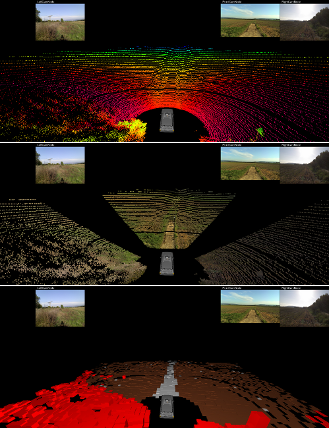
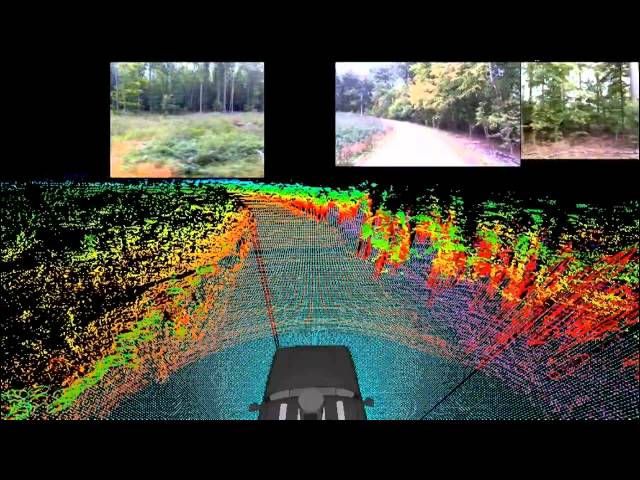
The working group was provided a mobile system that allows a demonstration of various skills in different outdoor scenarios. Macropod is equipped with a 3D laser range finder (LIDAR) to make autonomous driving in unknown, unstructured terrain possible in the long term. In addition, the mobile system is equipped with several color cameras, a GPS (Global Positioning System) receiver, an inertial measurement unit and wheel odometry sensors.

In an already completed project a test platform was constructed that enabled the acquisition of different sensor data. We developed a special software to visualize the sensor data. Furthermore, algorithms have been developed to determine the negotiability of the environment.
Environment perception plays an important role for the autonomous system. In order to classify the environment, the data of multiple sensors are fused. In the case of the cameras, an extrinsic calibration to the coordinate system of the 3D laser range finder was performed.
The surrounding terrain needs to be analyzed thoroughly according to the negotiability of the terrain surface. Therefore a Markov Random Field was implemented to classify the environment in real-time based on the fused camera-lidar data.
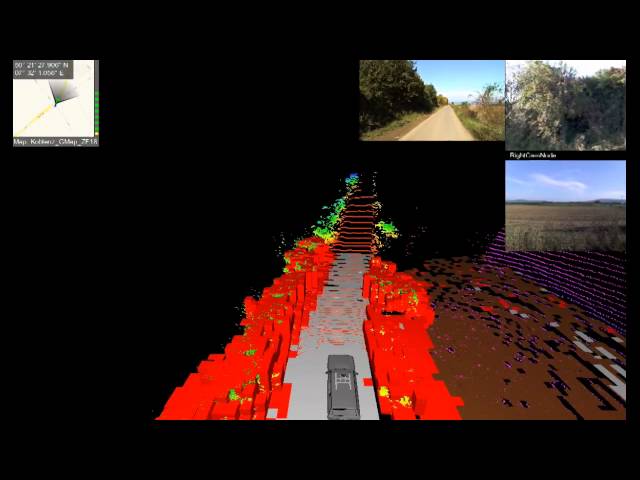
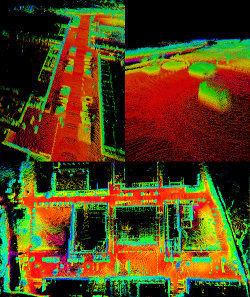
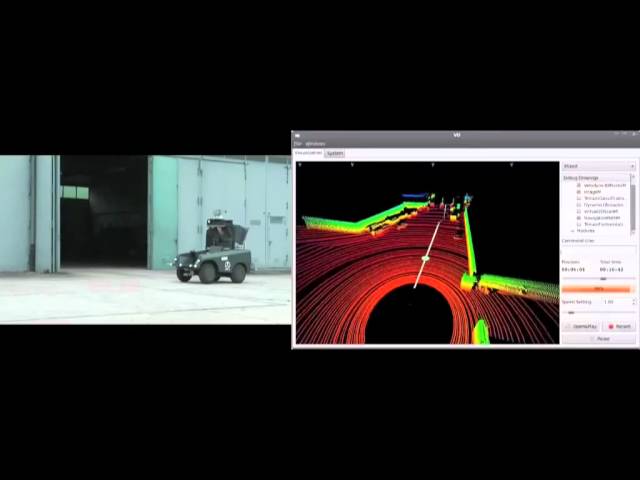
While the robot drives sensor readings are recorded and combined to a 3D map. The map is created and maintained in real-time during online operation of our autonomous robot, in order to be able to use it for other algorithms such as path-planning.
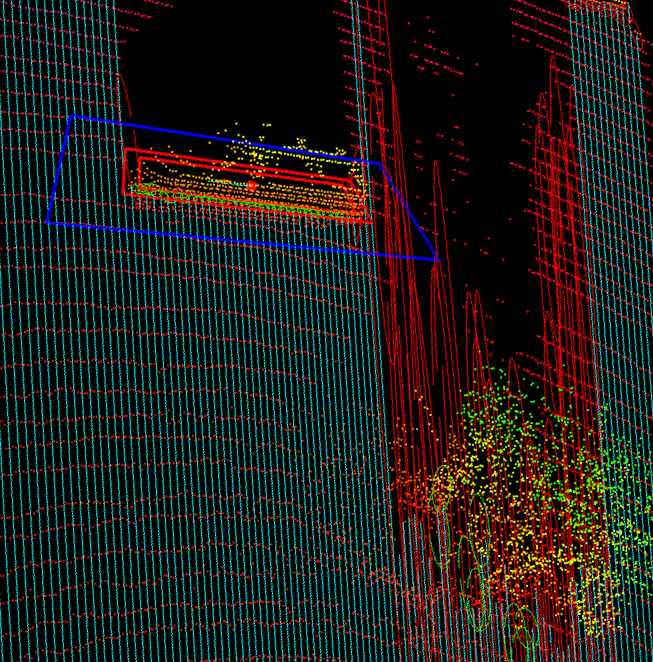
In the case the robot approaches a region he visited before, he is able to detect changes in the environment, e.g. a parked car on a parking lot that was empty on the first visit
While the project processes, the map will be enriched with various sensor data and knowledge, up to a semantic map.
Another objective of the project is the recognition and processing of dynamic changes in the environment of the autonomous vehicle. Dynamic objects, such as vehicles or pedestrians, require an enhanced approach. Their movement needs to be detected early and reliable and needs to be tracked over time. Thereby a collision with the own trajectory can be detected and avoided successfully.
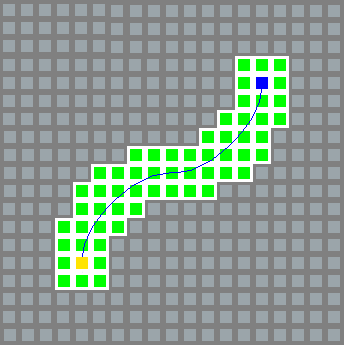
Path planning in unstructured environments is a challenging task for the autonomous system. The robot has to react quickly to changes, needs to be able to incorporate with uncertainties and errors and has to regard the terrain negotiability in real-time. We developed an new form of spline-based outdoor navigation, the spline templates, in order to solve this task for Macropod. This will also include the creation of a global path planning map in the future, with which the current sensor data can be compared to and which can be used for long term navigation.
Funding
Macropod is being financed by the Wehrtechnische Dienststelle für Pionier- und Truppengerät (WTD 51)
Contact
For questions or inquiries please refer to macropod at list.uni-koblenz.de
© Universität Koblenz


