Zum Profil

MineSweeper
MineSweeper: Visual SLAM and Visual Place Recognition in Challenging and Changing Environments (CCE)
The project investigates robust Visual SLAM (Simultaneous Localization and Mapping) and visual place recognition methods for ground robots operating in challenging or dynamic environments, such as those found in humanitarian mine clearance.
Project Overview
Visual navigation is a key alternative when GNSS (satellite-based positioning) is unreliable or unavailable—such as in forests, ruins, underground areas, or in regions where GNSS is intentionally disabled (e.g., for military reasons). Despite such constraints, mobile robots must autonomously and thoroughly explore their surroundings, even under limited visibility and changing environmental conditions. This requires highly robust perception and localization systems.
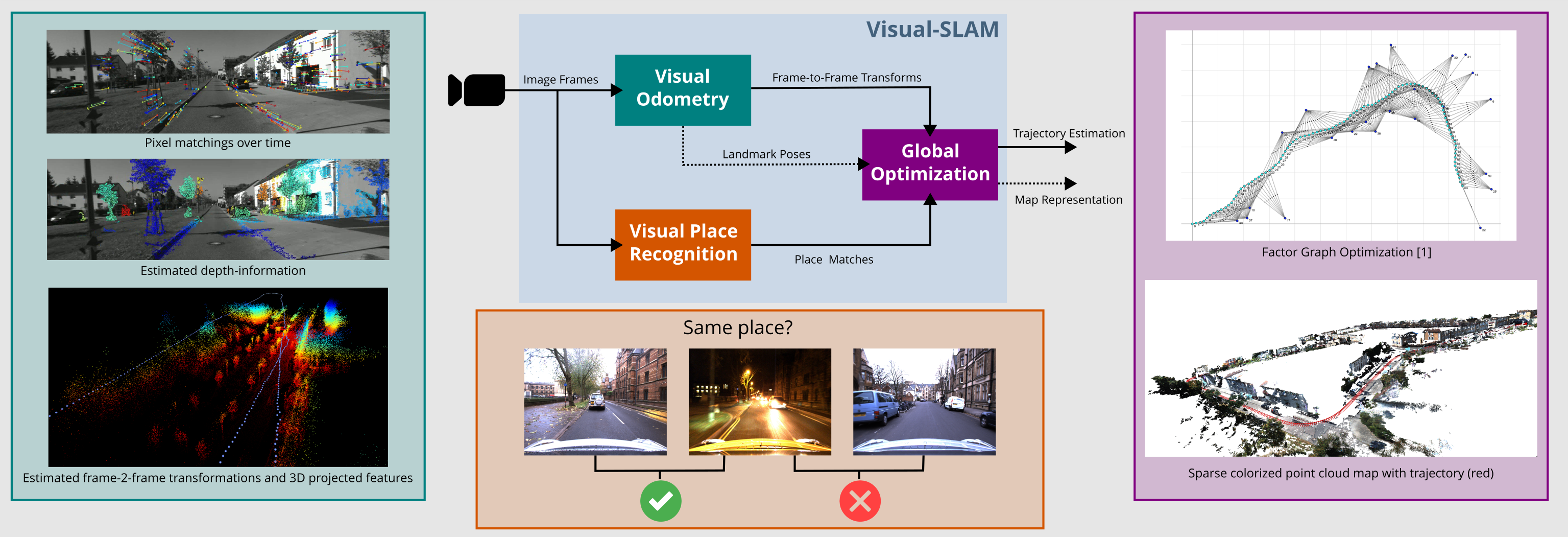
We address this challenge using Visual SLAM, which estimates both the 6-DoF camera trajectory and a map of the environment, using image data and optionally additional sensors such as motion.
Modern Visual SLAM systems typically combine a visual frontend for image processing with a non-linear optimization backend—often based on factor graphs—to jointly estimate poses and maps.
Visual place recognition plays a key role in detecting loop closures and correcting accumulated drift, enabling reliable long-term navigation.
Our research focuses on making these methods more robust to real-world challenges—including changes in lighting and weather—so that robots can operate safely and efficiently even in the toughest conditions.
Förderungen & Partnerschaften
Partnerschaften
Kontakt



© Universität Koblenz


